AUTOMOTIVE ADAS SOLUTION
Front and lateral image sensor module for autonomous vehilcles
자율주행 차량용 전방 및 측방 영상센서 모듈
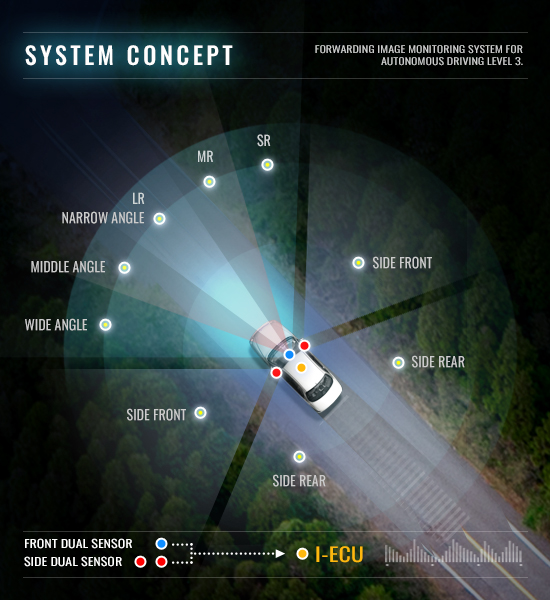
자율주행 Level 3를 위한 차량
“전방위 영상감시 시스템”
| ITEM | FEATURE | |
|---|---|---|
| CAMERA | Tri-focal (120, 60, 30) | Side-dual (100) |
| RESOLUTION | 2M(FHD) @ 60 FPS | |
| FRONT FUNCTION | Pedestrian Detection | Vehicle Detection |
| Cyclist Detection | Lane Detection | |
| Traffic light Recognition | ||
| SIDE FUNCTION | Pedestrian Detection | Vehicle Detection |
| Cyclist Detection | Lane Detection | |
SYSTEM APPROACH
-
다중차선인식
-
JC & POCKET 차선인식
-
보행자,차량,이륜차 인식
-
TRAFFIC SIGN 인식
- 도심로 자율주행
- 자동차 전용도로 자율 주행
SMART CAR IMAGE SYSTEM
AUTOMOTIVE ADAS SOLUTION
자율주행은 운전자의 개입이 없이 카메라, GPS, 레이더, 레이저센서 및 각종 센서,
제어시스템들의 정보를 이용하여 목적지까지 자동차를 안전하게 운행
-
영상처리기술
-
주행상황 판단
-
레이저 신호 처리 기술
-
주행경로 생성
-
차량제어기술
-
보행자. 사물인식. 거리계산
ADVANCED DRIVER ASSISTANCE SYSTEM
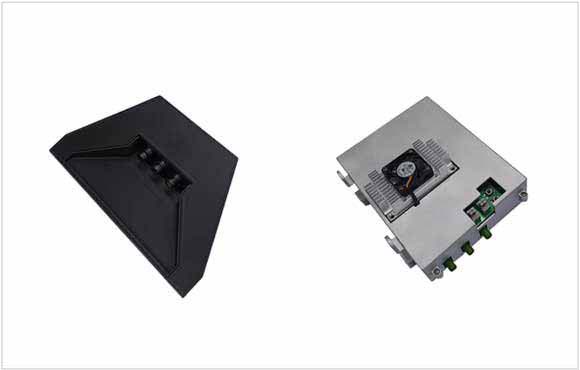
TRI-FOCAL CAMERA SYSTEM
- Trifocal camera providing 120/30/60-degree of multi-range to cover wide & tele range of forward direction.
- Support a pedestrian & vehicle detect, traffic signal recognition.
- Calculate various sensing data such as coordinates, speed, confidence-score, label etc.
- Integrated Control signal
| CATEGORY | ITEM | SPECIFICATION |
|---|---|---|
| Camera & ECU |
Resolution | 1920 x 1080 |
| Image Sensor | CMOS FHD SENSOR | |
| Frame Rate | 60fps | |
| View Angle | H: 30° / 60° / 120° | |
| Output Format | LVDS (PoC) | |
| Power | DC12V (±2.0V) | |
| Image Format | RAW Data | |
| Operating Temp. | - 40 - + 105°C |
8MP DUAL SCANNING CAMERA
- Dual camera solution based on wide and tele FoV.
- Detect an object at long distance widely.
- FOV of tele is extended to over 75° from 15° as a tele camera is actuated by prism right & left.
| CATEGORY | ITEM | SPECIFICATION |
|---|---|---|
| Camera | Input Voltage | DC 9V ~ DC 25V |
| Fov(H) | Wide : 120° Tele : 15° | |
| Pixel Resolution | 8M pixel | |
| Video Output | LVDS (PoC) | |
| Data Output | CAN | |
| Sensing | DSW | ML based |
| PD, VD, TLR, TSR | - |
IN-CABIN CAMERA SYSTEM
| Detect a hand gesture by using stereo cameras. | Driver Monitoring System |
| Detect a hand gesture in low light by IR. | Occupant Monitoring System |
| Control all function keys in AVN by hand gesture. | - |

| CATEGORY | ITEM | SPECIFICATION |
|---|---|---|
| Camera & ECU |
Input Voltage | DC 7V ~ DC 24V |
| Fov(H) | 82° | |
| Resolution | 1280 x 720p@ 60fps | |
| IR | 940nm LED | |
| Video Output | LVDS (PoC) | |
| Sensing | Data Output | CAN |
| - | Disparity Map |
DVRS CAMERA
- Built-in camera on a windshield for driving recording.
- Support the hight quality of video (2M@ 30fps)
- Enhanced images to improve wiew at low light.
- QHD (Front & Rear)

| CATEGORY | ITEM | SPECIFICATION |
|---|---|---|
| Camera & ECU |
Camera | FHD CMOS |
| Sensor Format | 1/2.8 inch | |
| Resolution | 1920 x 1080@ 30fps | |
| Pixel Size | 2.9um x 2.9um | |
| Fov(H) | 95° | |
| LENS F-Number | F2.0 | |
| Video output | LVDS, YUV422 1280 x 1080@ 30fps | |
| View mode | Front view |
FRU - FACE RECOGNITION UNIT
- Door un-locking & locking by recognizing a driver face
- High durability at outside environment
- High detection at low light.

| CATEGORY | ITEM | SPECIFICATION |
|---|---|---|
| Camera & System |
Resolution | 1280(H) x 800(V), 1Mp |
| Image Sensor | 1/4 inch CMOS Mono | |
| Frame Rate | 30fps | |
| View Angle | H85° ±3, V53° ±3 | |
| Output Format | LVDS(POC) | |
| Power | DC 8V(±0.5V) | |
| AP | CPU Arm Cortex |
FINGERPRINT SENSING SYSTEM
- Up to 6 fingerprint registration
- High durability
- Implementing autosar security solution

| CATEGORY | ITEM | SPECIFICATION |
|---|---|---|
| Fingerprint Sensing System |
MCU | 32bit RISC CPU |
| Max Register no. | 6 ↑ | |
| Interface | SPI | |
| OS | AUTOSAR | |
| Commuication | CAN, SPI | |
| FRR/FAR | FRR 1%, FAR 1/100,000 ↓ | |
| Operating temp. | -40 ~ 85°C | |
| Touch type | Capacitance |
HIGH RESOLUTION CAMERA / 7.4M, 8M
- Protect a camera from harsh environment, such as humidity, water and snow.
- Minimize thermal focal shift
- Application : Front camera

| CATEGORY | ITEM | SPECIFICATION |
|---|---|---|
| Camera & ECU |
Input Voltage | DC 9V ~ DC 25V |
| Fov(H) | 120° | |
| Pixel Resolution | 7.4/ 8M pixel | |
| Video Output | LVDS (POC) | |
| Data Output | CAN | |
| Sensing | PD, VD, TLR, TSR | - |
SHARK ANTENNA CAMERA
- Embedded camera in a shark antenna for replacing a room mirror & back-up camera.

| CATEGORY | ITEM | SPECIFICATION |
|---|---|---|
| Camera | Resolution | 1280(H) x 800(V), 1Mp |
| Image Sensor | 1/4" CMOS Mono | |
| Frame Rate | 30fps | |
| View Angle | H85° ±3, V53° ±3 | |
| Output Format | LVDS(POC) | |
| Power | DC 8V(±0.5V) |
NIGHT VISION CAMERA
| ITEM | SPECIFICATION | |
|---|---|---|
| Camera Performance |
Image sensor | MLX75411 |
| Optical Format | 1/4inch | |
| Resolution | 1024(H) x 512(V) | |
| View angle | D20˚(H16) | |
| Lens construction | 4~5 Glass, Visual/IR Pass (IP pass band: 800~1000nm) | |
| Module size | 31mmx16mmx25mm ( W x H x D ) | |
| ECU Performance |
Detectable distance | 3 ~ 150m |
| Warning | Present and warn pedestrians or vehicles ahead | |
| ECU housing | Fix both of camera and ECU | |
| Applications(Purposes) | Vehicle, Security, Military, Drone | |
GESTURE CAMERA SYSTEM

- GESTURE RECOGNITION

- VOICE RECOGNITION

| MCNEX GESTURE CAMERA |
|---|
| 130 ~ 180도 화각 HD 카메라, 1m 거리에서 차량 시스템 제어 |
| 역광, 흔들림 보정 |
| IR 사용으로 야간 및 극 저조도 상황 대응 |
RADAR & VIDEO LOW LEVEL FUSION PROCESSING SYSTEM
01
RECOGNITION
- 1 FUSION CAMERA
- 2 RADAR
- CAMERA 와 RADAR 에서 객체검지 후 신호전송
- 융합 분류기와 추적기를 활용하여 장애물 검출
02
ECU FUSION
- 3 FUSION ECU
- LOW-LEVEL FUSION의 결과를 토대로TTC(TIME TO COLLISION)를 계산
- AEB 제어를 위한 제어신호를 생성, CAN 통신을 통해 신호 출력
02
VEHICLE CONTROL
- 4 AUTOBOX
- 5 VEHICLE CONTROL DEVICE
- 차량 동작 제어를 위한 CAN 신호를 차량 제어 장치(ECS)에 보내 차량동작 제어
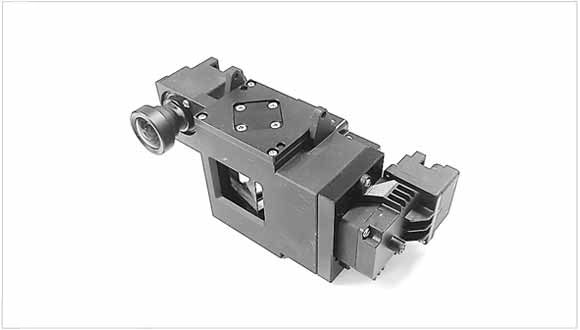
FUSION CAMERA
| HARDWARE | Sensor | 1/3-INCH CMOS |
|---|---|---|
| Pixel size | 3.75um | |
| Resolution | 1280 X672 60fps | |
| Data output | Parallel 16bit (YUV 4:2:2) | |
| control | I2C, RESET | |
| Power | DC 6.5V |
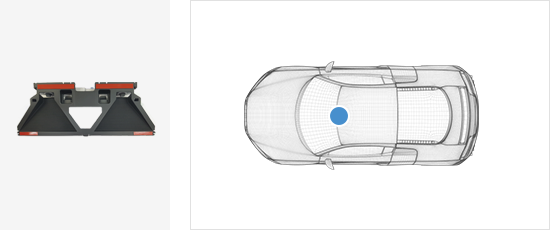
77GHZ LRR(LONG RANGE RADAR)
| HARDWARE | Antenna type | PCB type |
|---|---|---|
| Number of receiving antennas | 8 EA | |
| Waveform type | FMCW | |
| Size | 100↓ X 90↓ X 30↓ mm3 | |
| PERFORMANCES | Maximum range | 192 m |
| Velocity range | -200~100 kph | |
| FOV (Field Of View) | H: 64°V: 3° | |
| Cycle time | 50MS |
FUSION ECU
| HARDWARE | CPU | ZYNQ7020,ZYNQ7030 |
|---|---|---|
| DSP | TDA3X | |
| MCU | TMS570S | |
| CAN | CAN 2.0B | |
| POWER | DC12V | |
| CAMERA INPUT | LVDS 50Ω |
FUSION SESING SYSTEM
LOW LEVEL RADAR & IMAGE FUSION SYSTEM
AUTONOMOUS EMERGENCY BRAKING SYSTEM
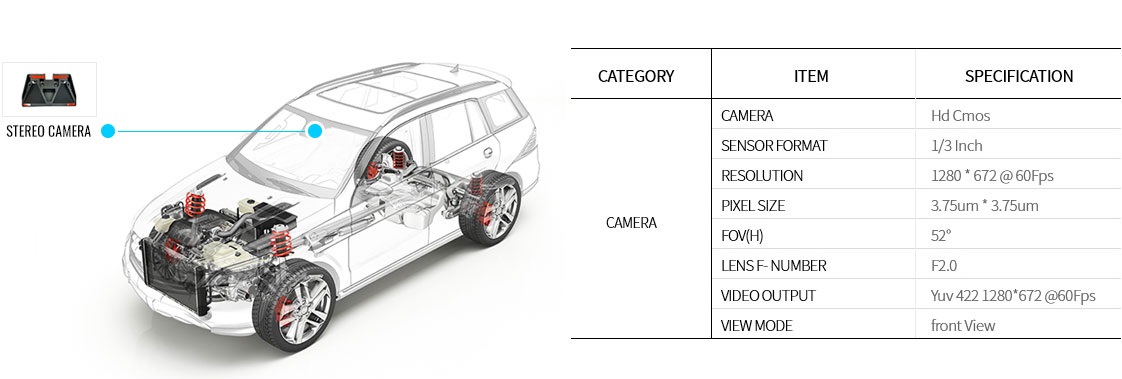
ROAD PREVIEW SENSOR
ACTIVE CHASSIS CONTROL SYSTEM OF PREVIEW SENSOR FOR ENHANCING DRIVING SAFETY
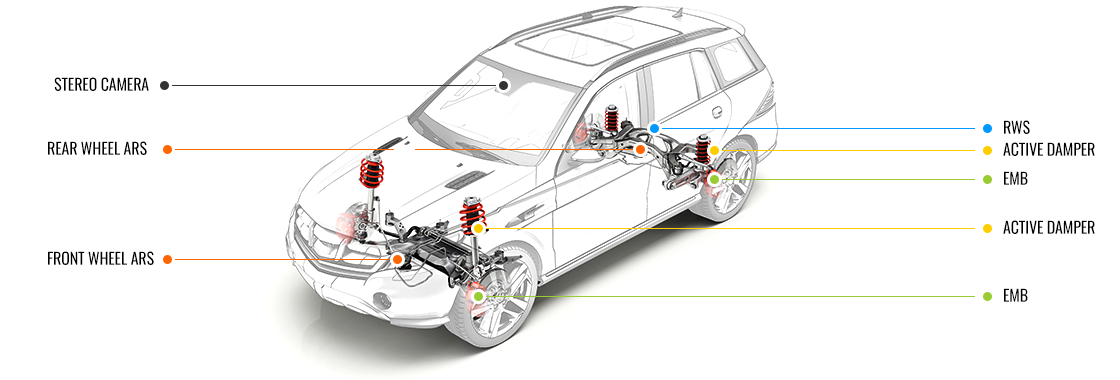
-

차선커브 인식
-

구배 인식
-

굴곡 인식
EXTERIOR DESIGN
| ITEMS | FEATURE |
|---|---|
| Resolution | 1M(HD) @ 60fps |
| Detection Range | 15m |
| Detection Speed | 15fps |
| Obstacle | Speed Bump/Pot Hole |
| Feature | Detecting Stereo Depth Map basis/Road Grade and Curvature/Pot Hole |
ROAD PREVIEW SENSOR
SOLUTION TO IMPROVE RIDING QUALITY & DRIVING SAFETY
ACTIVE CHASSIS CONTROL SYSTEM OF PREVIEW SENSOR FOR ENHANCING DRIVING SAFETY







